
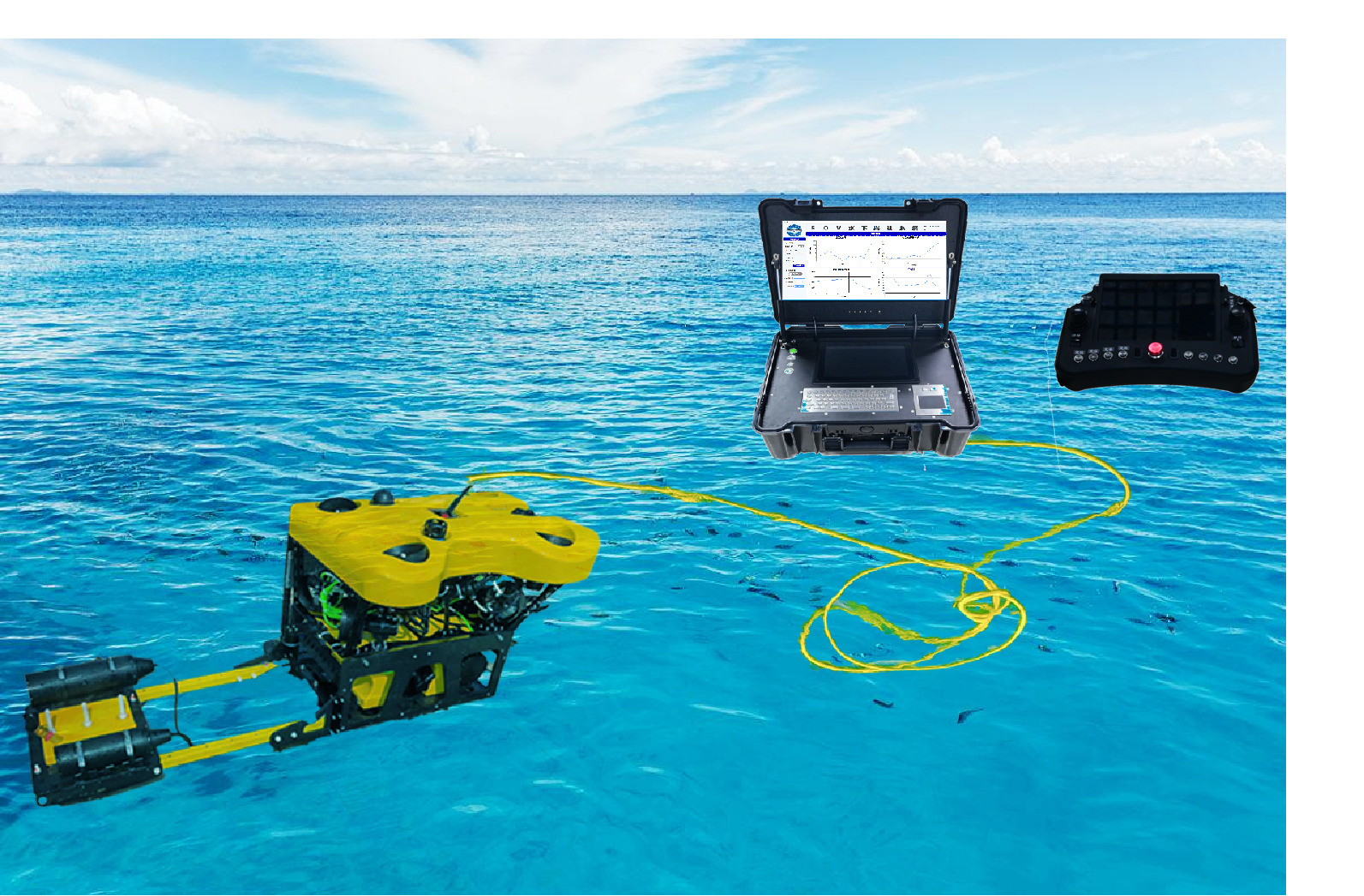
FRU200-24 Underwater intelligent ROV acoustic and magnetic integration detection system can complete underwater buried target detection, archaeology, inspection, search and rescue tasks. The detection system has the characteristic...
System composition:
Magnetic: optical pump + fluxgate
Sound: Multi-beam sonar
Light: Underwater camera
Location: Beidou RTK module
Platform: tethered underwater vehicle
Two-axis manipulator
•Measurement and control distance: 200m
•Pressure rating: 300m
•Underwater sonar imaging capability
•Magnetic detection capability for buried underwater targets
1. What can it detect?
It can be used to detect ferromagnetic objects, such as pipes and unexploded ordnance
2. Detection capability?
Type 72 mines ≥ 2 m
ordnance ≥ 4 m
100×10 square meters sea area ≤ 30 minutes
Detection rate ≥ 90%
False alarm density ≤ 0.05 / m2
3. Ideal sailing depth?
In the case of determining the safety of the system, as close as possible to the bottom, it is recommended to be more than 0.5m away from the bottom.
4. Can sand buried targets be detected?
Yes, the sand does not affect the work of the sensor or weaken the magnetic field strength, and cross-domain detection can be achieved.
Yu Long Qian Yue - Real-time acquisition software:
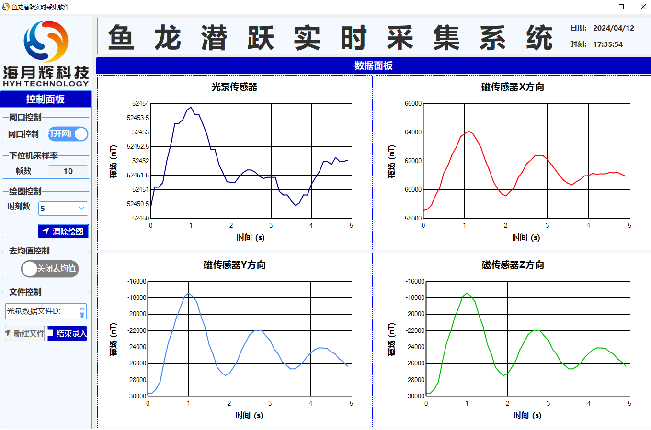
a) Magnetic detection system (optional)
1. Dual optical pump (total field)
2. Double fluxgate (three components)
3. Optical pump (total field) + fluxgate (three components)
b) Multi-beam sonar (optional)
c) Muddy Water Camera (Basic package)
d) Ultra Short baseline positioning System (optional)